Обозначение на схемах радиодеталей. Драйверы L293D, L298, TB6612 – H-мост управления двигателем Н мост на биполярных транзисторах
Отличительные особенности:
- Выключение при перегреве
- Выключение при перегрузке по току
- Пусковой ток ограничен функцией плавного старта
- Защита от электростатического разряда
- Статусная обратная связь
- Режим сна для непосредственного подключения батареи
- Работа с торможением и без
- Краткая характеристика:
- Сопротивление включенного канала Rds(on) 12 мОм
- Рабочее напряжение питания V cc.op. 5.5…35В
- Продолжительный ток нагрузки I cont. (Ta = 85°C) 7.0A
- Порог срабатывания токовой защиты Ishutdown 30A
- Рабочая частота 20 кГц
Типовая схема включения:
Блок-схема:

Расположение выводов:

Описание выводов:
Описание:
IR3220 – интегральная схема сдвоенного ключа верхнего уровня. Вместе с двумя ключами нижнего уровня, например, IRF741), IR3220 организует управляемый Н-мост. Она обеспечивает защиту от потери управляемости каждого плеча, логику управления H-мостом, плавный запуск и защиты от перегрузок по току и напряжению. Сигналами IN1 и IN2 задаются рабочие режимы и активизируется последовательность циклов ШИМ для плавного запуска старта для ограничения пускового тока. При использовании указанного типа транзистора и надлежащем охлаждении, внутренняя система микросхемы, контролирующая ключи верхнего уровня, защищает работу всего –Н-моста. Продолжительность плавного запуска задается постоянной времени внешней RC-цепи и сбрасывает автоматически.
Документация:
В различных электронных схемах часто возникает необходимость менять полярность напряжения, прикладываемого к нагрузке, в процессе работы. Схемотехника таких устройств реализуется с помощью ключевых элементов. Ключи могут быть выполнены на переключателях, электромагнитных реле или полупроводниковых приборах. Н-мост на транзисторах позволяет с помощью управляющих сигналов переключать полярность напряжения поступающего на исполнительное устройство.
В различных электронных игрушках, некоторых бытовых приборах и робототехнике используются коллекторные электродвигатели постоянного тока, а также двухполярные шаговые двигатели. Часто для выполнения какого-либо алгоритма нужно с помощью электрического сигнала быстро поменять полярность питающего напряжения с тем, чтобы двигатель технического устройства стал вращаться в противоположную сторону. Так робот-пылесос, наткнувшись на стену, мгновенно включает реверс и задним ходом отъезжает от препятствия. Такой режим реализуется с помощью Н-моста. Схема Н-моста позволяет так же изменять скорость вращения электродвигателя. Для этого на один из двух ключей подаются импульсы от широтно-импульсного модулятора (ШИМ).
Схемой управления режимами двигателя является h-мост. Это несложная электронная схема, которая может быть выполнена на следующих элементах:
- Биполярные транзисторы
- Полевые транзисторы
- Интегральные микросхемы
Основным элементом схемы является электронный ключ. Принципиальная схема моста напоминает латинскую букву «Н», отсюда название устройства. В схему входят 4 ключа расположенных попарно, слева и справа, а между ними включена нагрузка.

На схеме видно, что переключатели должны включаться попарно и по диагонали. Когда включен 1 и 4 ключ, электродвигатель вращается по часовой стрелке. 2 и 3 ключи обеспечивают работу двигателя в противоположном направлении. При включении двух ключей по вертикали слева или справа произойдёт короткое замыкание. Каждая пара по горизонтали закорачивает обмотки двигателя и вращения не произойдёт. На следующем рисунке проиллюстрировано, что происходит, когда мы меняем положение переключателей:

Если мы заменем в схеме переключатели на транзисторы, то получим такой вот (крайне упрощенный) вариант:

Для того чтобы исключить возможное короткое замыкание h-мост на транзисторах дополняется входной логикой, которая исключает появление короткого замыкания. В современных электронных устройствах мостовые схемы изменения полярности дополняются устройствами, обеспечивающими плавное и медленное торможение перед включением реверсного режима.
Н-мост на биполярных транзисторах
Транзисторы в ключевых схемах работают по принципу вентилей в режиме «открыт-закрыт», поэтому большая мощность на коллекторах не рассеивается, и тип применяемых транзисторов определяется, в основном, питающим напряжением. Несложный h-мост на биполярных транзисторах можно собрать самостоятельно на кремниевых полупроводниковых приборах разной проводимости.
 H-мост на биполярных транзисторах
H-мост на биполярных транзисторах
Такое устройство позволяет управлять электродвигателем постоянного тока небольшой мощности. Если использовать транзисторы КТ816 и КТ817 с индексом А, то напряжение питания не должно превышать 25 В. Аналогичные транзисторы с индексами Б или Г допускают работу с напряжением до 45 В и током не превышающим 3 А. Для корректной работы схемы транзисторы должны быть установлены на радиаторы. Диоды обеспечивают защиту мощных транзисторов от обратного тока. В качестве защитных диодов можно использовать КД105 или любые другие, рассчитанные на соответствующий ток.
Недостатком такой схемы является то, что нельзя подавать на оба входа высокий потенциал, так как открытие обоих ключей одновременно вызовет короткое замыкание источника питания. Для исключения этого в интегральных мостовых схемах предусматривается входная логика, полностью исключающая некорректную комбинацию входных сигналов.

Схему моста можно изменить, поставив в неё более мощные транзисторы.
Н-мост на полевых транзисторах
Кроме использования биполярных транзисторов в мостовых схемах управления питанием, можно использовать полевые (MOSFET) транзисторы. При выборе полупроводниковых элементов обычно учитывается напряжение, ток нагрузки и частота переключения ключей, при использовании широтно-импульсной модуляции. Когда полевой транзистор работает в ключевом режиме, у него присутствуют только два состояния – открыт и закрыт. Когда ключ открыт, то сопротивление канала ничтожно мало и соответствует резистору очень маленького номинала. При подборе полевых транзисторов для ключевых схем следует обращать внимание на этот параметр. Чем больше это значение, тем больше энергии теряется на транзисторе. При минимальном сопротивлении канала выше КПД моста и лучше его температурные характеристики.
Дополнительным негативным фактором является зависимость сопротивления канала от температуры. С увеличением температуры этот параметр заметно растёт, поэтому при использовании мощных полевых транзисторов следует предусмотреть соответствующие радиаторы или активные схемы охлаждения. Поскольку подбор полевых транзисторов для моста связан с определёнными сложностями, гораздо лучше использовать интегральные сборки. В каждой находится комплементарная пара из двух мощных MOSFET транзисторов, один из которых с P каналом, а другой с N каналом. Внутри корпуса также установлены демпферные диоды, предназначенные для защиты транзисторов.

В конструкции использованы следующие элементы:
- VT 1,2 – IRF7307
- DD 1 – CD4093
- R 1=R 2= 100 ком
Интегральные микросхемы с Н-мостом
В ключах Н-моста желательно использовать комплементарные пары транзисторов разной проводимости, но с одинаковыми характеристиками. Этому условию в полной мере отвечают интегральные микросхемы, включающие в себя один, два или более h-мостов. Такие устройства широко применяются в электронных игрушках и робототехнике. Одной из самых простых и доступных микросхем является L293D. Она содержит два h-моста, которые позволяют управлять двумя электродвигателями и допускают управление от ШИМ контроллера. Микросхема имеет следующие характеристики:
- Питание – + 5 В
- Напряжение питания электромотора – + 4,5-36 В
- Выходной номинальный ток – 500 мА
- Ток в импульсе – 1,2 А
Микросхема L298 так же имеет в своём составе два h-моста, но гораздо большей мощности. Максимальное напряжение питания, подаваемое на двигатель, может достигать + 46 В, а максимальный ток соответствует 4,0 А. Н-мост TB6612FNG допускает подключение двух коллекторных двигателей или одного шагового. Ключи выполнены на MOSFET транзисторах и имеют защиту по превышению температуры, перенапряжению и короткому замыканию. Номинальный рабочий ток равен 1,2 А, а максимальный пиковый – 3,2 А. Максимальная частота широтно-импульсной модуляции не должна превышать 100 кГц.
Мостовые устройства управления электродвигателями часто называют драйверами. Драйверами так же называют микросхемы, только обеспечивающие управление мощными ключевыми каскадами. Так в схеме управления мощным электродвигателем используется драйвер HIP4082. Он обеспечивает управление ключами, собранными на дискретных элементах. В них используются MOSFET транзисторы IRF1405 с N-каналами. Компания Texas Instruments выпускает большое количество интегральных драйверов предназначенных для управления электродвигателями разных конструкций. К ним относятся:
- Драйверы для шаговых двигателей – DRV8832, DRV8812, DRV8711
- Драйверы для коллекторных двигателей – DRV8816, DRV8848, DRV8412/32
- Драйверы для бесколлекторных двигателей – DRV10963, DRV11873, DRV8332
На рынке имеется большой выбор интегральных мостовых схем для управления любыми электродвигателями. Сделать конструкцию можно и самостоятельно, применив качественные дискретные элементы.
Для управления двигателями используются так называемые H-мосты, позволяющие путем подачи управляющих логических сигналов на входы вызывать вращение в обе стороны. В данной статье я собрал несколько вариантов Н-мостов. У каждого есть свои достоинства и недостатки, выбор за вами.
ВАРИАНТ №1Это транзисторный H-мост, его достоинсто - это простота изготовления, детали для него есть практически у каждого в хламе, а также он достаточно мощный, особенно если применить КТ816 и КТ817 транзисторы вместо КТ814, КТ815 указанных на схеме. На данный мост нельзя подавать на оба входа лог.1, т.к. произойдет короткое замыкание.
ВАРИАНТ №2
Этот H-мост собран на микросхеме, его достоинство - это одна микросхема:-), а еще то что в ней уже 2 Н-моста. К недостаткам можно отнести то, что микросхема маломощная - макс. ток выхода 600 мА. На линии E можно подавать сигнал ШИМ для управления скоростью, если это не требуется, то вывод Е нужно подключить к плюсу питания.
ВАРИАНТ №3
Этот вариант управления тоже на микросхеме, более мощной, чем L293D, но мост в ней один. Микросхема бывает в трех вариантах S, P, F. На рисунке изобажен вариант S. Вариант P более мощный, а вариант F - для поверхностного монтажа. У всех микросхем разная распиновка, для других смотрите даташит. Кстати эта схема позволяет подавать на оба входа единички, это вызывает торможение двигателя.
ВАРИАНТ №4
Этот мост собран на MOSFET транзисторах, он очень простой и достаточно мощный. На него нельзя подавать одновременно две единицы.
Существует еще достаточно много микросхем управления двигателями (например TLE4205, L298D), но указанные выше - самые популярные. Так же можно собрать Н-мост на обычных электромагнитных реле.
Рассмотрим драйвер электродвигателей на транзисторах и микросхеме L298, разберемся с принципом работы H-моста. Узнаем особенности подключения драйверов на L298 к разным двигателям и источникам питания, проведем простые эксперименты с шаговыми движками и двигателями постоянного напряжения. Подключение к Raspberry Pi и простейшие программы для теста управления драйвером.
Что такое H-мост
При проектировании станков, роботов и других автоматизированных устройств возникает необходимость управлять электродвигателем постоянного тока или же катушками шагового движка. Для того, чтобы иметь возможность управлять обмоткой двигателя и заставить его вал вращаться в разные стороны, необходимо выполнять коммутацию с переполюсовкой. Для подобной цели используется так называемый "H-мост".
Почему такое название? - потому что схема включения двигателя и переключателей для коммутации напоминает латинскую букву H. Принципы работы H-моста показан нарисунке ниже.
Рис. 1. Как работает H-мост, принцип коммутации двигателя для вращения в разные стороны.
Как видим, при помощи 4х переключателей мы можем подключать мотор к источнику питания в разной полярности, что в свою очередь заставит вращаться его вал в разные стороны. Переключатели можно заменить на реле, или же на мощные электронные ключи на транзисторах.
Важно заметить что НЕЛЬЗЯ допускать замыкания двух ключей на одной стороне H-моста, поскольку получится короткое замыкание, при проектировании схемы моста нужно заложить это правило в логику и таким образом реализовать защиту.
Схема простого H-моста на кремниевых транзисторах
Собрать простой драйвер двигателя постоянного тока (или для обмотки шагового двигателя) можно на распространенных кремниевых транзисторах.
![]()
Рис. 2. Принципиальная схема простого драйвера электродвигателя на кремниевых транзисторах.
Такой драйвер позволяет управлять электродвигателем постоянного тока с питающим напряжением до 25В (для КТ817А, КТ816А) и до 45В (для КТ817Б-Г, КТ816Б-Г) с током не более 3А. При большом рабочем и нагрузочном токе двигателя выходные транзисторы КТ817 и КТ816 должны быть установлены на радиаторы достаточного размера.
Установка диодов VD1-VD2 обязательна, они нужны для защиты выходных транзисторов от обратного тока. На их место можно поставить отечественные КД105А или другие на больший ток.
Собрав две такие схемки (2х6 транзисторов) можно также управлять шаговым двигателем или же двумя двигателями постоянного тока.
Для того чтобы не городить огород из 12 транзисторов можно применить специализированные микросхемы, ниже мы рассмотрим пример с микросхемой L298 и готовым блоком на ее основе.
Микросхема L298, характеристики и возможности
Интегральная микросхема L298 - это мощный универсальный мостовой драйвер для управления двигателями постоянного тока, шаговыми движками, электромагнитными реле и электромагнитами (соленоидами). В микросхеме содержится два H-моста, выполненных на мощных транзисторах, а также логика совместимая с TTL.

Рис. 3. Микросхема L298 в корпусах Multiwatt15 PowerSO20.
Основные технические характеристики:
- Рабочее напряжение - до 46В;
- Максимальный постоянный ток - 4А (с радиатором);
- Низкое напряжение насыщения;
- Защита от перегрева;
- Логический "0" = напряжение до 1,5В.
Где можно применить драйвер на микросхеме L298? - несколько идей:
- Управление шаговым двигателем;
- Управление двумя двигателями постоянного тока (DC motors);
- Коммутация катушек мощных реле;
- Управление соленоидами (электромагнитами).
Если посмотреть на структурную схему микросхему L298 то мы можем увидеть что-то на подобии схемы на рисунке 2, только с дополнительными логическими элементами.

Рис. 4. Внутренняя схема микросхемы L298N - мощный двойной H-мост.
Для каждого H-моста мы имеем по 3 входа: In1 - для подачи напряжения в одном направлении, In2 - в противоположном, и еще один вход En для подачи питания на выходные транзисторы моста.
Таким образом мы можем установить направление прохождения тока и управлять его подачей (включено или выключено, а также ШИМ).
Схема драйвера на микросхеме L298
Ниже представлена простая схема для драйвера двигателей на микросхеме L298N. Управление осуществляется по четырем проводам (вместо шести у L298) благодаря использованию дополнительных инверторов в микросхеме CD4011.

Рис. 5. Принципиальная схема драйвера электродвигателей на микросхеме L298N.
Для питания логики обеих микросхем нужно стабилизированное напряжение +5В (P2), можно использовать интегральный стабилизатор, например L7805 или же питать логику от имеющейся линии питания +5В. Для подачи питающего напряжения на двигатели используется отдельная линия питания P1.
Выводы P4, P5 используются для установки полярности каждого из каналов, а выводы P6, P7 - разрешают подачу питания на каскады (ключи) внутреннего H-моста для каждого канала.
Микросхему CD4011 можно заменить на отечественную К176ЛА7. Диоды Шоттки можно поставить другого номинала, на 35В/4А и более. Если не планируется ограничивать ток обмоток двигателя(двигателей) то низкоомные ограничивающие резисторы R9-R10 можно исключить из схемы, заменив их на перемычки.
В интернете можно заказать готовый модуль на L298, правда в нем будет 6 входов для управления.

Рис. 6. Готовые модули на L298.
Я для своих нужд приобрел готовый модуль по типу как на рисунке слева. В нем присутствует микросхема L298 и небольшой стабилизатор для подачи +5В на логику микросхемы.
Для подключения данной платки важно четко уяснить одну особенность:
- Если для питания двигателей используется напряжение более чем 12В то перемычку нужно убрать и подавать отдельно 5В на выделенный для этого коннектор
- Если питание двигателей будет осуществляться от напряжения 5-12В то перемычку нужно утсановить и дополнительное питание 5В не понадобится.
Если же подать на двигатели, например 20В и оставить перемычку установленной, то на модуле выгорит микросхемка-стабилизатор на 5В. Почему разработчики не установили интегральный стабилизатор с более широким диапазоном входных напряжений - не понятно.
Для того чтобы сэкономить два входа при подключении такого блока к Arduino или Raspberry Pi можно добавить часть схемы на CD4001, как на рисунке 5.
L298 + DC двигатели + Raspberry Pi
Для данного эксперимента к модулю на L298 были подключены два двигателя постоянного тока. Питание всего модуля осуществляется от одного аккумулятора на 6В. Поскольку это напряжение меньше 12В (смотрим выше описание) то перемычку внутреннего стабилизатора оставляем установленной и дополнительное питание +5В для логики не потребуется.
Перемычки "ENA" и "ENB", которые разрешают подачу питания на выходные мосты, оставлены установленными. Таким образом, для управления каждым из двигателей используем оставшиеся четыре входа: IN1, IN2, IN3, IN4.
После подключения питания на модуле загорится светодиод, теперь можем подать на каждый из входов поочередно +5В и посмотреть как будут вращаться наши движки.
Где взять +5В? - в данном случае это напряжение присутствует на разъеме питания, справа возле GND. Для теста можно воспользоваться кусочком проволоки - перемычкой.
Теперь подключим наш модуль к Raspberry Pi и напишем простую тестовую программу на Python. Для подключения модуля я использовал выводы GPIO вот в таком соответствии:

Рис. 7. L298 + Raspberry Pi + электродвигатели постоянного тока.
Мини-компьютер у меня питается через понижающий импульсный стабилизатор от второго аккумулятора на 6В. Перейдем к написанию программы для нашего эксперимента, наша цель - управлять вращением вала каждого из двигателей при помощи клавиатуры, которая подключена к Raspberry Pi или же удаленно по SSH, VNC.
Теперь испробуем простую программу, написанную на Python, которая поможет понять принцип управления электродвигателем постоянного тока.
Загружаем малинку, открываем Терминал или же подключаемся к ней удаленно при помощи SSH. Создаем новый файл и открываем его для редактирования при помощи команды:
Nano /home/pi/l298_dc_motors_test.py
Вставляем в редактор код скрипта на Python, который приведен ниже:
#!/usr/bin/env python # -*- coding: utf-8 -*- import time import RPi.GPIO as GPIO # Подготавливаем пины GPIO. GPIO.cleanup() GPIO.setmode(GPIO.BCM) GPIO.setup(4, GPIO.OUT) GPIO.output(4, GPIO.LOW) GPIO.setup(17, GPIO.OUT) GPIO.output(17, GPIO.LOW) # Включаем вращение двигателя 1 в одну сторону. GPIO.output(4, GPIO.HIGH) # ждем 5 секунд. time.sleep(5) # Выключаем двигатель 1. GPIO.output(4, GPIO.LOW) # ждем 10 секунд. time.sleep(10) # Включаем вращение двигателя 1 в другую сторону. GPIO.output(17, GPIO.HIGH) # ждем 5 секунд. time.sleep(5) # Выключаем двигатель 1. GPIO.output(17, GPIO.LOW)
Выходим из редактора и сохраняем файл. Делаем скрипт исполняемым и запускаем его:
Chmod +x /home/pi/l298_dc_motors_test.py /home/pi/l298_dc_motors_test.py
После запуска скрипта один из двигателей начнет вращаться в одну сторону на протяжении пяти секунд, потом он выключится и через 10 секунд начнет вращаться в другую сторону на протяжении 5-ти секунд.
Ниже приведен более сложный и функциональный пример программы, которая будет взаимодействовать с пользователем и позволит интерактивно управлять двумя электродвигателями. Аналогично первому скрипту, программу можно сохранить в тот же файл или в новый отдельно созданный.
Важно чтобы в данном примере кода соблюдались отступы, об этом я уже писал раньше .
#!/usr/bin/env python # -*- coding: utf-8 -*- import os import sys import curses import time import RPi.GPIO as GPIO # Установим номера пинов GPIO, с которыми будем работать M1_RIGHT = 4 M1_LEFT = 17 M2_RIGHT = 27 M2_LEFT = 22 # Функция для подготовки пинов GPIO def setup(*ports): GPIO.cleanup() # Режим именования пинов по названию, а не по номеру на плате GPIO.setmode(GPIO.BCM) for port in ports: # Установка пина на вывод + низкий уровень "0" GPIO.setup(port, GPIO.OUT) GPIO.output(port, GPIO.LOW) # Функция для установки низкого уровня на всех пинах (выключение) def stop_all(): GPIO.output(M1_LEFT, GPIO.LOW) GPIO.output(M1_RIGHT, GPIO.LOW) GPIO.output(M2_LEFT, GPIO.LOW) GPIO.output(M2_RIGHT, GPIO.LOW) # Функция для управления вращением движков def rotate(motor=1, mode="s"): # Выключаем все пины stop_all() # Для мотора 1 if motor == 1: if mode == "r": # Устанавливаем высокий уровень на пине M1_RIGHT (4) GPIO.output(M1_RIGHT, GPIO.HIGH) elif mode == "l": # Устанавливаем высокий уровень на пине M1_LEFT (17) GPIO.output(M1_LEFT, GPIO.HIGH) # Для мотора 2 elif motor == 2: if mode == "r": GPIO.output(M2_RIGHT, GPIO.HIGH) elif mode == "l": GPIO.output(M2_LEFT, GPIO.HIGH) # Выполним инициализацию пинов GPIO setup(M1_RIGHT, M1_LEFT, M2_RIGHT, M2_LEFT) # Инициализация экрана (модуль curses) stdscr = curses.initscr() # Реагировать на нажатие клавиш без подтверждения при помощи ENTER curses.cbreak() # Разрешить использование стрелочек на клавиатуре stdscr.keypad(1) # Не блокировать программу по времени при опросе событий stdscr.nodelay(1) # Отобразим на экране данные по умолчанию stdscr.addstr(0, 10, "Hit "q" to quit") stdscr.addstr(2, 10, "A - M1 Left, D - M1 Right") stdscr.addstr(3, 10, "< - M2 Left, > - M2 Right") stdscr.addstr(4, 10, "S - stop") stdscr.refresh() # Главный цикл while True: # Получаем код нажатия клавиши и проверяем его key = stdscr.getch() if key != -1: # Если клавиша "стрелка влево" то вращаем движок 2 влево if key == curses.KEY_LEFT: # Выводим на экран строку "M2 <---" в позиции 6, 10 stdscr.addstr(6, 10, "M2 <---") rotate(2, "l") # Если клавиша "стрелка вправо" то вращаем движок 2 вправо elif key == curses.KEY_RIGHT: stdscr.addstr(6, 10, "M2 --->") rotate(2, "r") # Если клавиша "а" то вращаем движок 1 влево elif key == ord("a"): stdscr.addstr(6, 10, "M1 <---") rotate(1, "l") # Если клавиша "d" то вращаем движок 1 вправо elif key == ord("d"): stdscr.addstr(6, 10, "M1 --->") rotate(1, "r") # Если клавиша "s" то останов всех движков elif key == ord("s"): stdscr.addstr(6, 10, "STOP 12") stop_all() # Если клавиша "s" то выходим из программы elif key == ord("q"): # Восстановление прежних настроек терминала stdscr.keypad(0) curses.echo() curses.endwin() # Очистка и выход os.system("clear") sys.exit() # Обновляем текст на экране и делаем небольшую задержку stdscr.refresh() time.sleep(0.01)
Запустив скрипт можно понажимать стрелочки клавиатуры "влево" и "вправо", а также клавиши с буквами "A" и "D" - двигатели должны вращаться поочередно и в разные стороны, а программа будет отображать их текущий режим работы.
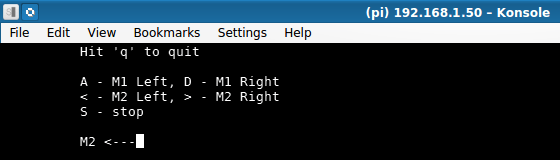
Рис. 8. Программа на Python для управления двигателями при помощи драйвера L298 (терминал Konsole, KDE).
Краткая видео-демонстрация работы данного эксперимента приведена ниже:
Что такое шаговый двигатель, типы шаговиков
Шаговый двигатель (для тех кто не знает) - это электромотор, в котором нет щеток и обмоток на статоре (якоре), они присутствуют на роторе и размещены таким образом что подключая каждую из них к источнику питания мы выполняем фиксацию ротора (делаем один шаг). Если поочередно подавать напряжение на каждую из обмоток с нужной полярностью то можно заставить двигатель вращаться (делать последовательные шаги) в нужном направлении.
Шаговые двигатели надежны, стойки к износу и позволяют контролировать вращение на определенный угол, применяются в автоматизации процессов, на производстве, в электронно-вычислительной аппаратуре(CD-DVD приводы, принтеры, копиры) и т.п.
Такие двигатели бывают следующих видов:
- Биполярный - 2 обмотки, по одной на каждую фазу, для управления можно использовать схему на 2 H-моста или один полу-мост с двуполярным питанием;
- Униполярный - 2 обмотки, каждая с отводом от середины, удобно переключать фазы сменой половинок каждой из обмоток, упрощает схему драйвера (4 ключа), а также использовать как быполярный без использования отводов от обмоток;
- С четирьмя обмотками - универсальный, подключив обмотки соответствующим образом можно использовать как быполярный или униполярный движок.

Рис. 9. Типы шаговых двигателей: биполярный, униполярный, с четырьмя обмотками.
Определить тип используемого двигателя можно, как правило, по количеству выводов на его корпусе, а также не помешает прозвонить все выводы тестером для определения есть ли соеднения между обмотками.
L298 + шаговый двигатель + Raspberry Pi
Теперь давайте подключим шаговый двигатель, в моем случае применен биполярный мощный шаговый двигатель, извлеченный из старого матричного принтера.
Для подключения одного биполярного двигателя потребуется два выхода драйвера на L298 (два H-моста). Для данного эксперимента модуль L298 нужно подключить к Raspberry Pi так же, как и в варианте с .
Прежде можете поэкспериментировать без малинки - подавать поочередно на входы модуля L298 напряжение 5В и посмотреть как вал двигателя будет выполнять шаги.
По сути дела, при помощи малинки, мы будем поочередно и с некоторой задержкой подавать импульсы на обмотки движка, чем заставим его вал вращаться в нужную нам сторону и с нужной скоростью.

Рис. 10. Подключение биполярного шагового двигателя к модулю L298 для управления через Raspberry Pi.
Если все уже подключено, то переходим к экспериментам с простой тестовой программой на Python, которая поможет понять как работать с шаговыми двигателем используя L298 + Raspberry Pi.
Создадим файл для скрипта и откроем его для редактирования:
Nano /home/pi/l298_stepper_motor_test.py
Вставляем в редактор следующий код скрипта на Python:
#!/usr/bin/env python # -*- coding: utf-8 -*- import time import RPi.GPIO as GPIO # Подготавливаем пины GPIO. GPIO.cleanup() GPIO.setmode(GPIO.BCM) GPIO.setup(4, GPIO.OUT) GPIO.output(4, GPIO.LOW) GPIO.setup(17, GPIO.OUT) GPIO.output(17, GPIO.LOW) GPIO.setup(27, GPIO.OUT) GPIO.output(27, GPIO.LOW) GPIO.setup(22, GPIO.OUT) GPIO.output(22, GPIO.LOW) # Временная задержка между шагами, сек. step_timeout = 0.0105 # Длительность импульса, сек. impulse_timeout = 0.008 # Шаг 1. GPIO.output(4, GPIO.HIGH) time.sleep(impulse_timeout) GPIO.output(4, GPIO.LOW) time.sleep(step_timeout) # Шаг 2. GPIO.output(17, GPIO.HIGH) time.sleep(impulse_timeout) GPIO.output(17, GPIO.LOW) time.sleep(step_timeout) # Шаг 3. GPIO.output(27, GPIO.HIGH) time.sleep(impulse_timeout) GPIO.output(27, GPIO.LOW) time.sleep(step_timeout) # Шаг 4. GPIO.output(22, GPIO.HIGH) time.sleep(impulse_timeout) GPIO.output(22, GPIO.LOW) time.sleep(step_timeout) # Ждем 10 секунд. time.sleep(10) # 20 раз по 4 шага в цикле. for i in range(0,20): GPIO.output(4, GPIO.HIGH) time.sleep(impulse_timeout) GPIO.output(4, GPIO.LOW) time.sleep(step_timeout) GPIO.output(17, GPIO.HIGH) time.sleep(impulse_timeout) GPIO.output(17, GPIO.LOW) time.sleep(step_timeout) GPIO.output(27, GPIO.HIGH) time.sleep(impulse_timeout) GPIO.output(27, GPIO.LOW) time.sleep(step_timeout) GPIO.output(22, GPIO.HIGH) time.sleep(impulse_timeout) GPIO.output(22, GPIO.LOW) time.sleep(step_timeout)
Делаем файл со скриптом исполняемым и запускаем его на исполнение:
Chmod +x /home/pi/l298_stepper_motor_test.py /home/pi/l298_stepper_motor_test.py
осле запуска скрипта, шаговый двигатель должен совершить 4 шага (вращение в одну сторону), потом подождав 10 секунд он снова начнет свое вращение и сделает уже 20*4 шагов.
А теперь рассмотрим пример интерактивной программы, которая позволяет управлять направлением и скоростью вращения (последовательные шаги) шагового двигателя с использованием клавиатуры.
#!/usr/bin/env python # -*- coding: utf-8 -*- import os import sys import curses import time import RPi.GPIO as GPIO # Функция для подготовки пинов GPIO def setup(*ports): GPIO.cleanup() # Режим именования пинов по названию, а не по номеру на плате GPIO.setmode(GPIO.BCM) for port in ports: # Установка пина на вывод + низкий уровень "0" GPIO.setup(port, GPIO.OUT) GPIO.output(port, GPIO.LOW) # Функция для подачи импульса на пин с некоторой задержкой (1 шаг) def impulse(port=0): GPIO.output(port, GPIO.HIGH) # Set the timeout value to be anough for one step time.sleep(0.008) GPIO.output(port, GPIO.LOW) time.sleep(timeout) # Выполняем установку нужных нам пинов GPIO setup(4, 17, 27, 22) # Задержка между шагами (по умолчанию) timeout = 0.0105 # Направление вращения (по умолчанию) direction = "r" # Инициализация экрана (модуль curses) stdscr = curses.initscr() # Реагировать на нажатие клавиш без подтверждения при помощи ENTER curses.cbreak() # Разрешить использование стрелочек на клавиатуре stdscr.keypad(1) # Не блокировать программу по времени при опросе событий stdscr.nodelay(1) # Отобразим на экране данные по умолчанию stdscr.addstr(0, 10, "Hit "q" to quit") stdscr.addstr(2, 10, "--->") stdscr.addstr(3, 10, "Timeout: " + str(timeout)) stdscr.refresh() # Главный цикл while True: # Набор импульсов для вращения вала мотора вправо if direction == "r": impulse(4) impulse(17) impulse(27) impulse(22) # Набор импульсов для вращения вала мотора влево elif direction == "l": impulse(22) impulse(27) impulse(17) impulse(4) # Считываем код нажатия клавиши и проверяем его key = stdscr.getch() if key != -1: # Клавиша "влево" меняет направление вращения: ВЛЕВО if key == curses.KEY_LEFT: # отображаем текст "<---" в позиции экрана 2, 10 stdscr.addstr(2, 10, "<---") # Изменим значение переменной с направлением вращения direction = "l" # Клавиша "вправо" меняет направление вращения: ВПРАВО elif key == curses.KEY_RIGHT: stdscr.addstr(2, 10, "--->") direction = "r" # Клавиша "вверх" ускоряет вращение elif key == curses.KEY_UP: # Уменьшаем задержку между шагами timeout = timeout - 0.0005 # Клавиша "вниз" замедляет вращение elif key == curses.KEY_DOWN: # Увеличиваем задержку между шагами timeout = timeout + 0.0005 # Клавиша "q" выполняет выход из программы elif key == ord("q"): stdscr.keypad(0) curses.echo() curses.endwin() os.system("clear") sys.exit() # Смотрим чтобы время задержки не перешло границу 0 if timeout <= 0: timeout = 0.0005 # Обновляем текст на экране stdscr.addstr(3, 10, "Timeout: " + str(timeout)) stdscr.refresh() time.sleep(0.01)
Теперь клацаем клавиши стрелок влево и вправо и смотрим как будет изменяться направление вращения вала двигателя, а при нажатии клавиш вверх и вниз скорость будет увеличиваться и уменьшаться соответственно.
Если же двигатель не вращается, то возможно что потребуется сменить полярность подключения одной из обмоток к модулю на L298.

Рис. 11. Программа управления биполярным шаговым двигателем, L298, Raspberry Pi.
Видео-демонстрация работы шагового двигателя:
Заключение
Надеюсь вы получили ответ на вопрос "что такое H-мост и как он работает", из экспериментов должно быть понятно как применять драйвер на микросхеме L298 и подключать к нему разные движки.
Важно заметить что в интернете можно найти готовые библиотеки и скрипты на Python для удобного управления двигателями при помощи H-моста на L298 с использованием Raspberry Pi.
Начинающие радиолюбители нередко сталкиваются с такой проблемой, как обозначение на схемах радиодеталей и правильное прочтение их маркировки. Основная трудность заключается в большом количестве наименований элементов, которые представлены транзисторами, резисторами, конденсаторами, диодами и другими деталями. От того, насколько правильно прочитана схема, во многом зависит ее практическое воплощение и нормальная работа готового изделия.
Резисторы
К резисторам относятся радиодетали, обладающие строго определенным сопротивление протекающему через них электрическому току. Данная функция предназначена для понижения тока в цепи. Например, чтобы лампа светила менее ярко, питание на нее подается через резистор. Чем выше сопротивление резистора, тем меньше будет свечение лампы. У постоянных резисторов сопротивление остается неизменным, а переменные резисторы могут изменять свое сопротивление от нулевого значения до максимально возможной величины.
Каждый постоянный резистор обладает двумя основными параметрами - мощностью и сопротивлением. Значение мощности указывается на схеме не буквенными или цифровыми символами, а с помощью специальных линий. Сама мощность определяется по формуле: P = U x I, то есть равна произведению напряжения и силы тока. Данный параметр имеет важное значение, поскольку тот или иной резистор может выдержать лишь определенное значение мощности. Если это значение будет превышено, элемент просто сгорит, так как во время прохождения тока по сопротивлению происходит выделение тепла. Поэтому на рисунке каждые линии, нанесенные на резистор, соответствуют определенной мощности.

Существуют и другие способы обозначения резисторов на схемах:

- На принципиальных схемах обозначается порядковый номер в соответствии с расположением (R1) и значение сопротивления, равное 12К. Буква «К» является кратной приставкой и обозначает 1000. То есть, 12К соответствует 12000 Ом или 12 килоом. Если в маркировке присутствует буква «М», это указывает на 12000000 Ом или 12 мегаом.
- В маркировке с помощью букв и цифр, буквенные символы Е, К и М соответствуют определенным кратным приставкам. Так буква Е = 1, К = 1000, М = 1000000. Расшифровка обозначений будет выглядеть следующим образом: 15Е - 15 Ом; К15 - 0,15 Ом - 150 Ом; 1К5 - 1,5 кОм; 15К - 15 кОм; М15 - 0,15М - 150 кОм; 1М2 - 1,5 мОм; 15М - 15мОм.
- В данном случае используются только цифровые обозначения. Каждое включает в себя три цифры. Первые две из них соответствуют значению, а третья - множителю. Таким образом, к множителям относятся: 0, 1, 2, 3 и 4. Они означают количество нулей, добавляемых к основному значению. Например, 150 - 15 Ом; 151 - 150 Ом; 152 - 1500 Ом; 153 - 15000 Ом; 154 - 120000 Ом.
Постоянные резисторы
Название постоянных резисторов связано с их номинальным сопротивлением, которое остается неизменным в течение всего периода эксплуатации. Они различаются между собой в зависимости от конструкции и материалов.

Проволочные элементы состоят из металлических проводов. В некоторых случаях могут использоваться сплавы с высоким удельным сопротивлением. Основой для намотки проволоки служит керамический каркас. Данные резисторы обладают высокой точностью номинала, а серьезным недостатком считается наличие большой собственной индуктивности. При изготовлении пленочных металлических резисторов, на керамическое основание напыляется металл, обладающий высоким удельным сопротивлением. Благодаря своим качествам, такие элементы получили наиболее широкое распространение.
Конструкция угольных постоянных резисторов может быть пленочной или объемной. В данном случае используются качества графита, как материала с высоким удельным сопротивлением. Существуют и другие резисторы, например, интегральные. Они применяются в специфических интегральных схемах, где использование других элементов не представляется возможным.
Переменные резисторы
Начинающие радиолюбители нередко путают переменный резистор с конденсатором переменной емкости, поскольку внешне они очень похожи друг на друга. Тем не менее, у них совершенно разные функции, а также имеются существенные отличия в отображении на принципиальных схемах.

В конструкцию переменного резистора входит ползунок, вращающийся по резистивной поверхности. Его основной функцией является подстройка параметров, заключающаяся в изменении внутреннего сопротивления до нужного значения. На этом принципе основана работа регулятора звука в аудиотехнике и других аналогичных устройствах. Все регулировки осуществляются за счет плавного изменения напряжения и тока в электронных устройствах.
Основным параметром переменного резистора является сопротивление, способное изменяться в определенных пределах. Кроме того, он обладает установленной мощностью, которую должен выдерживать. Этими качествами обладают все типы резисторов.

На отечественных принципиальных схемах элементы переменного типа обозначаются в виде прямоугольника, на котором отмечены два основных и один дополнительный вывод, располагающийся вертикально или проходящих сквозь значок по диагонали.
На зарубежных схемах прямоугольник заменен изогнутой линией с обозначением дополнительного вывода. Рядом с обозначением ставится английская буква R с порядковым номером того или иного элемента. Рядом проставляется значение номинального сопротивления.
Соединение резисторов
В электронике и электротехнике довольно часто используются соединения резисторов в различных комбинациях и конфигурациях. Для большей наглядности следует рассматривать отдельный участок цепи с последовательным, параллельным и .

При последовательном соединении конец одного резистора соединяется с началом следующего элемента. Таким образом, все резисторы подключаются друг за другом, и по ним протекает общий ток одинакового значения. Между начальной и конечной точкой существует только один путь для протекания тока. С возрастанием количества резисторов, соединенных в общую цепь, происходит соответствующий рост общего сопротивления.

Параллельным считается такое соединение, когда начальные концы всех резисторов объединяются в одной точке, а конечные выходы - в другой точке. Течение тока происходит по каждому, отдельно взятому резистору. В результате параллельного соединения с увеличением числа подключенных резисторов, возрастает и количество путей для протекания тока. Общее сопротивление на таком участке уменьшается пропорционально количеству подключенных резисторов. Оно всегда будет меньше, чем сопротивление любого резистора, подключенного параллельно.

Чаще всего в радиоэлектронике используется смешанное соединение, представляющее собой комбинацию параллельного и последовательного вариантов.
На представленной схеме параллельно соединяются резисторы R2 и R3. Последовательное соединение включает в себя резистор R1, комбинацию R2 и R3 и резистор R4. Для того чтобы рассчитать сопротивление такого соединения, вся цепь разбивается на несколько простейших участков. После этого значения сопротивлений суммируются и получается общий результат.
Полупроводники
Стандартный полупроводниковый диод состоит из двух выводов и одного выпрямляющего электрического перехода. Все элементы системы объединяются в общем корпусе из керамики, стекла, металла или пластмассы. Одна часть кристалла называется эмиттером, в связи с высокой концентрацией примесей, а другая часть, с низкой концентрацией, именуется базой. Маркировка полупроводников на схемах отражает их конструктивные особенности и технические характеристики.

Для изготовления полупроводников используется германий или кремний. В первом случае удается добиться более высокого коэффициента передачи. Элементы из германия отличаются повышенной проводимостью, для которой достаточно даже невысокого напряжения.
В зависимости от конструкции, полупроводники могут быть точечными или плоскостными, а по технологическим признакам они бывают выпрямительными, импульсными или универсальными.
Конденсаторы
Конденсатор представляет собой систему, включающую два и более электродов, выполненных в виде пластин - обкладок. Они разделяются диэлектриком, который значительно тоньше, чем обкладки конденсатора. Все устройство имеет взаимную емкость и обладает способностью к сохранению электрического заряда. На простейшей схеме конденсатор представлен в виде двух параллельных металлических пластин, разделенных каким-либо диэлектрическим материалом.

На принципиальной схеме рядом с изображением конденсатора указывается его номинальная емкость в микрофарадах (мкФ) или пикофарадах (пФ). При обозначении электролитических и высоковольтных конденсаторов, после номинальной емкости указывается значение максимального рабочего напряжения, измеряемого в вольтах (В) или киловольтах (кВ).
Переменные конденсаторы
Для обозначения конденсаторов с переменной емкостью используются два параллельных отрезка, которые пересекает наклонная стрелка. Подвижные пластины, подключаемые в определенной точке схемы, изображаются в виде короткой дуги. Возле нее проставляется обозначение минимальной и максимальной емкости. Блок конденсаторов, состоящий из нескольких секций, объединяется с помощью штриховой линии, пересекающей знаки регулировки (стрелки).

Обозначение подстроечного конденсатора включает в себя наклонную линию со штрихом на конце вместо стрелки. Ротор отображается в виде короткой дуги. Другие элементы - термоконденсаторы обозначаются буквами СК. В его графическом изображении возле знака нелинейной регулировки проставляется температурный символ.
Постоянные конденсаторы
Широко используются графические обозначения конденсаторов с постоянной емкостью. Они изображаются в виде двух параллельных отрезков и выводов из середины каждого из них. Возле значка проставляется буква С, после нее - порядковый номер элемента и с небольшим интервалом - числовое обозначение номинальной емкости.


При использовании в схеме конденсатора с , вместо его порядкового номера наносится звездочка. Значение номинального напряжения указывается лишь для цепей с высоким напряжением. Это касается всех конденсаторов, кроме электролитических. Цифровой символ напряжения проставляется после обозначения емкости.
Соединение многих электролитических конденсаторов требует соблюдения полярности. На схемах для обозначения положительной обкладки используется значок «+» либо узкий прямоугольник. При отсутствии полярности узкими прямоугольниками помечаются обе обкладки.
Диоды и стабилитроны
Диоды относятся к простейшим полупроводниковым приборам, функционирующим на основе электронно-дырочного перехода, известного как p-n-переход. Свойство односторонней проводимости наглядно передается на графических обозначениях. Стандартный диод изображается в виде треугольника, символизирующего анод. Вершина треугольника указывает направление проводимости и упирается в поперечную черту, обозначающую катод. Все изображение пересекается по центру линией электрической цепи.

Для используется буквенное обозначение VD. Оно отображает не только отдельные элементы, но и целые группы, например, . Тип того или иного диода указывается возле его позиционного обозначения.
Базовый символ применяется и для обозначения стабилитронов, представляющих собой полупроводниковые диоды с особыми свойствами. В катоде присутствует короткий штрих, направленный в сторону треугольника, символизирующего анод. Данный штрих располагается неизменно, независимо от положения значка стабилитрона на принципиальной схеме.
Транзисторы
У большинства радиоэлектронных компонентов имеется лишь два вывода. Однако такие элементы как транзисторы оборудованы тремя выводами. Их конструкции отличаются разнообразными типами, формами и размерами. Общие принципы работы у них одинаковые, а небольшие отличия связаны с техническими характеристиками конкретного элемента.

Транзисторы используются преимущественно в качестве электронных коммутаторов для включения и выключения различных устройств. Основное удобство таких приборов заключается в возможности коммутировать большое напряжение с помощью источника малого напряжения.
По своей сути каждый транзистор является полупроводниковым прибором, с помощью которого генерируются, усиливаются и преобразуются электрические колебания. Наибольшее распространение получили биполярные транзисторы с одинаковой электропроводностью эмиттера и коллектора.
На схемах они обозначаются буквенным кодом VT. Графическое изображение представляет собой короткую черточку, от середины которой отходит линия. Данный символ обозначает базу. К ее краям проводятся две наклонные линии под углом 60 0 , отображающие эмиттер и коллектор.

Электропроводность базы зависит от направления стрелки эмиттера. Если она направлена в сторону базы, то электропроводность эмиттера - р, а у базы - n. При направлении стрелки в противоположную сторону, эмиттер и база меняют электропроводность на противоположное значение. Знание электропроводности необходимо для правильного подключения транзистора к источнику питания.
Для того чтобы обозначение на схемах радиодеталей транзистора было более наглядным, оно помещается в кружок, означающий корпус. В некоторых случаях выполняется соединение металлического корпуса с одним из выводов элемента. Такое место на схеме отображается в виде точки, проставляемой там, где вывод пересекается с символом корпуса. Если же на корпусе имеется отдельный вывод, то линия, обозначающая вывод, может подсоединяться к кружку без точки. Возле позиционного обозначения транзистора указывается его тип, что позволяет существенно повысить информативность схемы.
Буквенные обозначение на схемах радиодеталей
|
Основное обозначение |
Наименование элемента |
Дополнительное обозначение |
Вид устройства |
|
Устройство |
Регулятор тока |
||
|
Блок реле |
|||
|
Устройство |
|||
|
Преобразователи |
Громкоговоритель |
||
|
Датчик тепловой |
|||
|
Фотоэлемент |
|||
|
Микрофон |
|||
|
Звукосниматель |
|||
|
Конденсаторы |
Батарея конденсаторов силовая |
||
|
Блок конденсаторов зарядный |
|||
|
Интегральные схемы, микросборки |
ИС аналоговая |
||
|
ИС цифровая, логический элемент |
|||
|
Элементы разные |
Теплоэлектронагреватель |
||
|
Лампа осветительная |
|||
|
Разрядники, предохранители, устройства защитные |
Дискретный элемент защиты по току мгновенного действия |
||
|
То же, по току инерционного действия |
|||
|
Предохранитель плавкий |
|||
|
Разрядник |
|||
|
Генераторы, источники питания |
Батарея аккумуляторов |
||
|
Синхронный компенсатор |
|||
|
Возбудитель генератора |
|||
|
Устройства индикационные и сигнальные |
Прибор звуковой сигнализации |
||
|
Индикатор |
|||
|
Прибор световой сигнализации |
|||
|
Табло сигнальное |
|||
|
Лампа сигнальная с зеленой линзой |
|||
|
Лампа сигнальная с красной линзой |
|||
|
Лампа сигнальная с белой линзой |
|||
|
Индикаторы ионные и полупроводниковые |
|||
|
Реле, контакторы, пускатели |
Реле токовое |
||
|
Реле указательное |
|||
|
Реле электротепловое |
|||
|
Контактор, магнитный пускатель |
|||
|
Реле времени |
|||
|
Реле напряжения |
|||
|
Реле команды включения |
|||
|
Реле команды отключения |
|||
|
Реле промежуточное |
|||
|
Катушки индуктивности, дроссели |
Дроссель люминесцентного освещения |
||
|
Измеритель времени действия, часы |
|||
|
Вольтметр |
|||
|
Ваттметр |
|||
|
Выключатели и разъединители силовые |
Выключатель автоматический |
||
|
Резисторы |
Терморезистор |
||
|
Потенциометр |
|||
|
Шунт измерительный |
|||
|
Варистор |
|||
|
Устройство коммутации в цепях управления, сигнализации и измерительных цепях |
Выключатель или переключатель |
||
|
Выключатель кнопочный |
|||
|
Выключатель автоматический |
|||
|
Автотрансформаторы |
Трансформатор тока |
||
|
Трансформаторы напряжения |
|||
|
Преобразователи |
Модулятор |
||
|
Демодулятор |
|||
|
Блок питания |
|||
|
Преобразователь частоты |
|||
|
Приборы электровакуумные и полупроводниковые |
Диод, стабилитрон |
||
|
Прибор электровакуумный |
|||
|
Транзистор |
|||
|
Тиристор |
|||
|
Соединители контактные |
Токосъемник |
||
|
Соединитель высокочастотный |
|||
|
Устройства механические с электромагнитным приводом |
Электромагнит |
||
|
Замок электромагнитный |
 Полезные свойства рыбьего жира для мужчин
Полезные свойства рыбьего жира для мужчин Перпендикулярность прямых в пространстве
Перпендикулярность прямых в пространстве Вегетарианский картофельный суп с овсяными хлопьями Суп картофельный вегетарианский рецепт
Вегетарианский картофельный суп с овсяными хлопьями Суп картофельный вегетарианский рецепт